
Methods for rotational speed control of marine circulating water pump based on fuzzy logic

-
摘要:目的 在船舶上,由于汽轮机负载变化迅速,易导致冷凝器真空度波动剧烈。为实现真空度快速稳定,设计一种用于调节船用循环水泵转速的模糊控制器。方法 通过优化控制器内增加的稳态工况预设值与模糊变量插值这2种方法,克服模糊控制器原本存在的稳态误差大和稳定性差的缺点,通过热力系统仿真,验证优化后的模糊控制器的控制效果。结果 验证结果显示,与常规比例积分微分(PID)控制相比,优化后的模糊控制器能使冷凝器真空度达到稳定的时间减少约50%,最大误差减少约40%。结论 优化后的模糊控制是实现循环水泵转速快速调节的有效方法。Abstract:Objectives The rapid change of load of the marine steam turbine easily leads to violent fluctuation in the vacuum degree of the condenser. In order to stabilize the vacuum rapidly, a fuzzy controller is designed to regulate the rotational speed of the circulating water pump.Methods It was optimized by adding the steady state preset value of the pump and the interpolation of fuzzy variables. The optimization overcame the shortcomings of traditional fuzzy controller such as large steady state error and poor stability. Through the simulation of thermal system, the control effect of the optimized fuzzy controller was verified.Results The verification results show that, compared with conventional PID control, the optimized fuzzy controller enables a reduction in time for vacuum of the condenser to be stabilized about 50% and a reduction in maximum error about 40%.Conclusions Therefore, the optimized fuzzy control is an effective method to realize fast rotational speed regulation of the circulating pump.
-
0. 引言
循环水泵转速是保证冷凝器及汽轮机正常工作的重要因素之一,转速快、稳定,对动力系统的正常运行来说尤为重要。在船舶上,由于汽轮机负荷变化频繁,容易导致冷凝器内真空度波动剧烈。为适应船用条件下冷凝器真空度的变化特性,快速自动控制循环水泵转速是研究的重点。
目前,船上各设备常用的控制方式主要以比例积分微分(PID)控制为主。PID控制简单、易操作,能够满足大多数工业控制的要求。但是,对于循环水泵的转速控制,从水泵转速变化到真空度调整,要经过循环水流量变化、冷凝器内传热等过程,这会延迟冷凝器内真空度的调节时间,易使PID控制出现超调、波动频繁等现象。随着控制技术的发展,模糊控制对解决这类非线性问题特别有效[1-5]。冯玉昌等[6]研究了模糊控制在蒸汽发生器液位控制中的应用;董海运等[7]研究了模糊控制在船用锅炉汽包水位控制系统中的应用;程坷飞等[8]研究了模糊控制在比例变量泵控制系统中的应用。结果表明,模糊控制响应快、鲁棒性强,但经典的模糊控制稳态偏差大,控制精度低[9-10]。基于此,本文将设计一种优化的模糊控制器,用于改善船用循环水泵的控制品质。
1. 系统建模
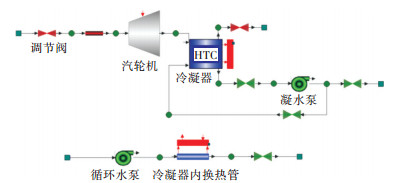
采用国内市场成熟的热工系统仿真软件对汽轮机、冷凝器和循环水系统建立模型,仿真模型包括部分蒸汽系统、凝水系统及循环水系统。冷凝器与循环水系统通过两相换热模块相连,其热力系统模型如图 1所示。蒸汽通过调节阀经过阻力件(管道)进入汽轮机做功,做功后的乏汽进入冷凝器冷凝,冷凝水通过凝水泵排出或经过凝水旁路调节阀回流至冷凝器,循环水通过循环水泵流经冷凝器内换热管换热后排出。
在热力系统仿真过程中,通过调整汽轮机前调节阀的开度来控制汽轮机的负荷;通过调节凝水泵后支路上的调节阀开度来控制冷凝器的液位;通过调整循环水泵的转速和抽气器的抽汽流量来控制冷凝器的真空度。要减少系统内蒸汽被抽出的量,提高系统运行效率,循环水泵的转速是冷凝器真空度的主要调节参数。
在热力系统内,循环水泵采用的是离心泵模型,其方程为
ΔPpump=Kcpb(CV⋅N)2+Kcpa⋅CV⋅NF√ρ (1) 式中:ΔPpump为水泵排出压头与吸入压头之差;Kcpb,Kcpa为离心泵常数;CV为气蚀系数;N为转速驱动值(归一化后的转速为n/n0);F为泵吸入流量;ρ为冷凝水密度。
为简化冷凝器计算,采用如下模型:
d(ρV)dτ=Dnj+Dxh−Dcq (2) 式中:V为冷凝水体积;τ为时间;Dnj为冷凝器蒸汽凝结量,是进入冷凝器的蒸汽流量与抽气器抽出流量之差;Dxh为凝水泵后支路循环回冷凝器的水流量;Dcq为经凝水泵抽出的水流量。
经仿真验证,热力系统在循环水泵定速运行条件下运行稳定,满足后续实验要求。
2. 模糊控制器设计
2.1 模糊控制器结构
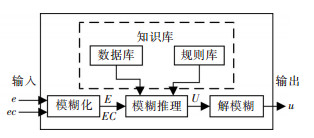
本文采用的是二维模糊控制器,其结构如图 2所示。以冷凝器真空度与设定值之间的偏差值e(单位:MPa)及其偏差变化率ec(单位:MPa/s)为模糊控制器的输入,经过模糊化后再进行模糊推理,最后经过解模糊得到真实的输出值,这里采用离线计算得出的模糊控制表作为模糊推理的依据。图中,u为循环水泵驱动变量,E,EC,U为e,ec,u对应的模糊变量。
2.2 模糊变量及隶属度函数的确定
经过热力模型的运行估算,冷凝器真空度偏差e的变化范围为[-0.02,0.02];偏差变化率ec的变化范围为[-0.002,0.002];循环水泵驱动变量u的变化范围为[0, 1],即e,ec和u的基本论域为[-0.02,0.02],[-0.002,0.002]和[0, 1]。
与实际输入e,ec,u对应的模糊变量E,EC,U的论域如下。
偏差模糊变量E的论域为
E={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
偏差变化率模糊变量EC的论域为
EC={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
循环水泵驱动模糊变量U的论域为
U={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
实际输入变量与模糊变量之间的转换关系为:
E=round(Emax (3) EC = {\rm round} \left( {\frac{{E{C_{\max }} - E{C_{\min }}}}{{e{c_{\max }} - e{c_{\min }}}}ec} \right) (4) u = \frac{{{u_{\max }} - {u_{\min }}}}{{{U_{\max }} - {U_{\min }}}}U + \frac{{{u_{\max }} - {u_{\min }}}}{2} (5) 式中,round()为四舍五入算法。
其中,式(5)为解模糊算法。
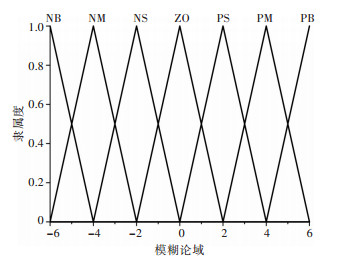
通过语言变量,将各模糊变量论域分割。语言变量模糊子集的取值分别为:负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)和正大(PB)。分割后的隶属度函数曲线如图 3所示。
2.3 控制规则设计
模糊控制的核心在于控制规则的设计,控制规则一般由专家及运行人员根据实际运行情况确定。本文根据热力系统模型的运行情况,基于以下原则设计模糊控制的控制规则:
1)当真空度偏差模糊变量E和偏差变化率模糊变量EC为“正大”时,真空度已经高于设定值,且误差还在大幅度增加,因此,循环水泵驱动模糊变量U需取“负大”,以降低循环水流量。
2)当真空度偏差模糊变量E和偏差变化率模糊变量EC为“负大”时,真空度已经低于设定值,且误差还在大幅度降低,因此循环水泵驱动模糊变量U需取“正大”,以增加循环水流量。
3)当真空度偏差模糊变量E和偏差变化率模糊变量EC为“正中”时,真空度已经高于设定值,且误差还在中等幅度增加,为减少超调量,循环水泵驱动模糊变量U需取“负大”,以降低循环水流量。
根据以上原则,可以得出船用循环水泵驱动模糊变量U的模糊控制规则如表 1所示。
表 1 模糊控制规则Table 1. Fuzzy control rulesEC E NB NM NS ZO PS PM PB NB PB PB PB PM PM ZO ZO NM PB PB PM PM PS ZO NS NS PB PB PM PS ZO NS NM ZO PB PM PS ZO NS NM NB PS PM PS ZO NS NM NB NB PM PS ZO NS NM NM NB NB PB ZO ZO NM NM NB NB NB 2.4 模糊控制器优化
1)针对模糊控制稳态误差偏差大的问题。
由于模糊控制器缺少积分环节,导致稳态误差随工况变化而变化,因此模糊控制器的实际输出需添加稳态工况预设值,以减少稳态误差。其表达式为
\begin{array}{l} u' = u + \Delta u' = \left( {\frac{{{u_{\max }} - {u_{\min }}}}{{{U_{\max }} - {U_{\min }}}}} \right)U + \left( {\frac{{{u_{\max }} - {u_{\min }}}}{2} + \Delta u'} \right) = \\ \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;kU + \Delta u \end{array} (6) 式中:u'为实际循环水泵驱动输出值;k为反模糊量化因子;Δu'为控制器内过程调节变量;Δu为稳态工况预设值,其物理意义为稳态运行时循环水泵的开度,可根据模型中循环水泵在各负荷下稳定运行时的数据得到,实际工程应用中可在调试过程中得到。
Δu值在各工况下按照线性插值法从表 2中计算得出。
表 2 Δu插值表Table 2. The interpolation table of Δu蒸汽调节阀开度 Δu 0.25 0.15 0.50 0.32 0.62 0.40 0.75 0.49 0.87 0.57 1.00 0.64 2)针对模糊控制稳定性差的问题。
模糊控制稳定性差的原因在于模糊控制采用了离散的模糊控制表进行模糊推理。当模糊变量E或EC处于两个相邻整数中间时,在模糊运算中采用四舍五入法取整后,会出现模糊变量U和实际循环水泵驱动量u的阶跃变化,进而导致冷凝器真空度的波动。因此在E∈[-1, 1]和EC∈[-1, 1]小范围内,采用线性插值的方法,在保证冷凝器真空度快速调节的同时,避免阀门调节开度信号在稳定工况下发生阶跃性变化。线性插值方法如下:
\begin{array}{l} {U_{{\rm{floor }}}} = \frac{{E - {\rm{ floor }}(E)}}{{ cell (E) - {\rm{ floor }}(E)}}*\left( {{U_{{\rm{cell(E)}}{\rm{. floor }}(EC)}}} \right) - \\ \;\;\;\;\;\;\;\;\;\;{U_{{\rm{floor(E), floor }}(EC)}} + {U_{{\rm{floor }}(E),{\rm{ floor }}(EC)}} \end{array} (7) \begin{array}{l} {U_{{\rm{cell }}}} = \frac{{E - {\rm{ floor }}(E)}}{{ cell (E) - {\rm{ floor }}(E)}}*\left( {{U_{{\rm{cell(E)}}{\rm{. cell(EC) }}}}} \right)\\ \left. {\;\;\;\;\;\;\;{U_{{\rm{floor }}(E),{\rm{ floor }}(EC)}}} \right) + {U_{{\rm{floor }}(E),{\rm{ cell }}(EC)}} \end{array} (8) U = \frac{{EC - {\rm{ floor }}(EC)}}{{ cell (EC) - {\rm{ floor }}(EC)}}*\left( {{U_{{\rm{cell }}}} - {U_{{\rm{floor }}}}} \right) + {U_{{\rm{floor }}}} (9) 式中:Ufloor与Ucell为过程参数;floor(E)为E向下取整值;cell(E)为E向上取整值;floor(EC)为EC向下取整值;cell(EC)为EC向上取整值;Ucell(E),floor(EC)为当模糊输入E=cell(E),EC=floor(EC)时对应的输出模糊值;Ufloor(E),floor(EC)为E= floor(E),EC=floor(EC)时对应的输出模糊值;Ucell(E),cell(EC)为E=cell(E),EC=cell(EC)时对应的输出模糊值;Ufloor(E),cell(EC)为E=floor(E),EC=cell(EC)时对应的输出模糊值。
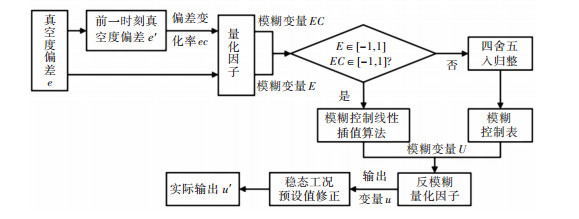
优化后的模糊逻辑控制器运算流程如图 4所示。
3. 控制系统仿真与结果分析
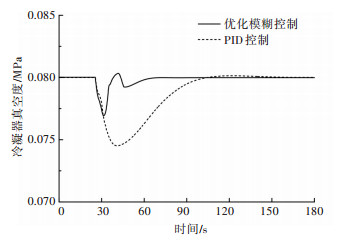
热力仿真系统中,蒸汽供给采用3.5 MPa,270 ℃的过热蒸汽,凝水泵后压力边界为0.75 MPa,循环水入口压力为标准大气压,温度为20 ℃。在此边界条件下,为验证上述优化后的模糊控制器在汽轮机大负荷变动时控制有效,将汽轮机负荷从30%升至100%,模拟船舶突然加速、汽轮机突加负荷的运行工况。优化模糊控制及常规PID控制下冷凝器真空度的变化如图 5所示。
由图 5可以看出,优化后的模糊控制器控制稳定、速度更快。从增大汽轮机负荷开始至37 s后,冷凝器真空度达到稳定运行水平,而PID控制则在75 s后才达到稳定,优化后的模糊控制稳定时间较PID控制减少了约50%,且最大误差较PID控制减少了约40%。
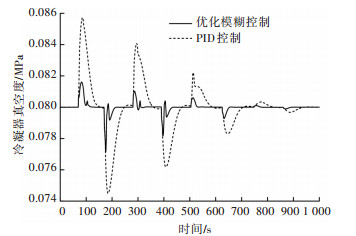
图 6所示是模拟汽轮机负荷在连续变动工况下,冷凝器真空度分别在优化后的模糊控制与常规PID控制下的变化情况。汽轮机负荷每间隔100 s左右变动一次,分别经历了100%,30%,100%,50%,100%,70%,100%,90%的蒸汽负荷工况。由图 6可知,优化后的模糊控制在汽轮机大功率负荷升与降的过程中,真空度的控制表现都较常规PID突出,且优化后的模糊控制器克服了稳态误差大和稳定性差的缺点,较常规PID调节时间更短。
![]() 图 6 多工况下冷凝器真空度变化情况Figure 6. The change of the condenser vacuum under different operating conditions
图 6 多工况下冷凝器真空度变化情况Figure 6. The change of the condenser vacuum under different operating conditions4. 结语
通过建模仿真,针对船用条件下汽轮机负荷变化迅速、冷凝器真空度波动大的特点,分别采用优化后的模糊控制与常规PID控制方法实现循环水泵的自动控制。实验结果表明,经过优化后的模糊控制克服了经典模糊控制精度差的缺点,且与常规PID控制相比,稳定时间减少了约50%,最大误差减少了约40%,更加适用于船上汽轮机负荷大幅度变动的运行工况,可以实现冷凝器真空度的快速稳定,是实现循环水泵优化控制的有效方法。
-
![]()
图 6 多工况下冷凝器真空度变化情况
Figure 6. The change of the condenser vacuum under different operating conditions
表 1 模糊控制规则
Table 1 Fuzzy control rules
EC E NB NM NS ZO PS PM PB NB PB PB PB PM PM ZO ZO NM PB PB PM PM PS ZO NS NS PB PB PM PS ZO NS NM ZO PB PM PS ZO NS NM NB PS PM PS ZO NS NM NB NB PM PS ZO NS NM NM NB NB PB ZO ZO NM NM NB NB NB  下载: 导出CSV
下载: 导出CSV
表 2 Δu插值表
Table 2 The interpolation table of Δu
蒸汽调节阀开度 Δu 0.25 0.15 0.50 0.32 0.62 0.40 0.75 0.49 0.87 0.57 1.00 0.64
下载: 导出CSV
-
[1] 丁永生, 应浩, 任立红, 等.解析模糊控制理论:模糊控制系统的结构和稳定性分析[J].控制与决策, 2000, 15(2):129-135. http://d.old.wanfangdata.com.cn/Periodical/kzyjc200002001 Ding Y S, Ying H, Ren L H, et al. Analytical fuzzy control theory:structure and stability analysis of fuzzy control systems[J]. Control and Decision, 2000, 15(2):129-135(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/kzyjc200002001
[2] 张永生, 马运义.蒸汽发生器水位的模糊-PID复合控制[J].船海工程, 2011, 40(2):64-65, 69. http://d.old.wanfangdata.com.cn/Periodical/whzc201102018 Zhang Y S, Ma Y Y. The fuzzy-PID control system of the water level for steam generator[J]. Ship & Ocean Engineering, 2011, 40(2):64-65, 69(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/whzc201102018
[3] 王丽娟.模糊控制在非线性系统中的应用研究[J].电子设计工程, 2012, 20(4):73-75. http://d.old.wanfangdata.com.cn/Periodical/dzsjgc201204024 Wang L J. Research on the application of fuzzy control in the nonlinear system[J]. Electronic Design Engineering, 2012, 20(4):73-75(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/dzsjgc201204024
[4] 左为恒, 程源. Smith预估-模糊控制在硝酸氧化炉自设定氨空比控制中的应用[J].化工自动化及仪表, 2017, 44(3):228-232. http://www.cnki.com.cn/Article/CJFDTotal-HGZD201703002.htm Zuo W H, Cheng Y. Application of Smith-fuzzy predictive control in auto-setting ammonia-air ratio in nitric acid oxidation furnace[J]. Control and Instruments in Chemical Industry, 2017, 44(3):228-232(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-HGZD201703002.htm
[5] 张丽萍, 弓栋梁, 薛斌.基于T-S模型和PID控制的车辆半主动悬架仿真比较研究[J].机械设计与制造, 2017(11):183-186. http://d.old.wanfangdata.com.cn/Periodical/jxsjyzz201711046 Zhang L P, Gong D L, Xue B. Simulation and research of vehicle semi-active suspension based on T-S model and PID control[J]. Machinery Design & Manufacture, 2017(11):183-186(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jxsjyzz201711046
[6] 冯玉昌, 史冬琳, 张秀宇.核电站蒸汽发生器水位模糊控制系统的设计与仿真[J].化工自动化及仪表, 2015, 42(10):1077-1080, 1098. http://d.old.wanfangdata.com.cn/Periodical/hgzdhjyb201510004 Feng Y C, Shi D L, Zhang X Y. Design and simulation of level fuzzy control system for steam generators[J]. Control and Instruments in Chemical Industry, 2015, 42(10):1077-1080, 1098(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hgzdhjyb201510004
[7] 董海运, 肖航.船用锅炉汽包水位模糊控制研究[J].中国舰船研究, 2009, 4(1):73-76. http://d.old.wanfangdata.com.cn/Periodical/zgjcyj200901016 Dong H Y, Xiao H. Research on the fuzzy controller of marine boiler drum level[J]. Chinese Journal of Ship Research, 2009, 4(1):73-76(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zgjcyj200901016
[8] 程坷飞, 王向周, 王渝, 等.基于T-S模型的比例变量泵模糊控制系统[J].液压与气动, 2007(7):37-40. http://d.old.wanfangdata.com.cn/Periodical/yyyqd200707013 Cheng K F, Wang X Z, Wang Y, et al. Proportional variable pump fuzzy control system based on T-S model[J]. Chinese Hydraulics & Pneumatics, 2007(7):37-40(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yyyqd200707013
[9] 张曾科.一种提高模糊控制器控制精度的方法[J].清华大学学报(自然科学版), 1998, 38(3):58-61. http://d.old.wanfangdata.com.cn/Periodical/qhdxxb199803014 Zhang Z K. A kind of method to improve controlling precision of fuzzy controller[J]. Journal of Tsinghua University (Science and Technology), 1998, 38(3):58-61(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/qhdxxb199803014
[10] 陈霞.基于模糊单神经元控制的磁力轴承控制研究[J].中原工学院学报, 2007, 18(3):13-16. http://d.old.wanfangdata.com.cn/Periodical/zzfzgxyxb200703004 Chen X. Research of magnetic bearing control based on fuzzy logic and single neuron[J]. Journal of Zhongyuan University of Technology, 2007, 18(3):13-16(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zzfzgxyxb200703004
-
期刊类型引用(3)
1. 施兴华,季葛盛,钱佶麒,张婧. 基于PID的ROV运动控制仿真. 中国海洋平台. 2024(01): 26-32+50 .  百度学术
百度学术
2. 郭一谚,姜玉海,郭瑞,方博,赵红瑞,王晓峰. 电控比例变量泵的模糊控制算法研究. 兵器材料科学与工程. 2021(06): 103-106 . 百度学术
3. 杨立宾,马桂楠. 基于大数据的汽轮机循环水泵变频改造后节能控制优化. 自动化应用. 2020(09): 12-14 . 百度学术
其他类型引用(1)
计量
- 文章访问数: 380
- HTML全文浏览量: 213
- PDF下载量: 46
- 被引次数: 4
