
Correlation between blade parameters and underwater radiated noise of rim-driven thruster

-
摘要:目的
旨在探究轮缘推进器叶片构型参数对其水动力及噪声性能的影响。
方法采用URANS/IDDES/LES湍流模型结合P-FWH方程的混合方法,在均匀流和无空化条件下对轮缘推进器的性能进行评估,并讨论其尾迹演化特点。
结果结果显示,采用所提方法推进效率大于55%,在500 Hz频带内的声压级低于90 dB的设计方案,叶片螺距主要分布在1.2D~1.6D区间,叶梢弦长主要分布在0.25D~0.3D区间。
结论研究结果可为轮缘推进器的设计效率提供一定支持。
Abstract:ObjectiveThis study aims to examine the impacts of the blade design parameters on the hydrodynamic and hydro-acoustic performance of a rim-driven thruster.
MethodsThe evaluation of the rim-driven thruster's performance is carried out using a hybrid approach wherein the URANS/IDDES/LES solver is combined with the P-FWH equations under uniform flow and non-cavitation conditions. The characteristics of its wake evolution are then discussed.
ResultsFor propulsion efficiency greater than 55%, the sound pressure level in the 500 Hz frequency band is below 90 dB in the design scheme. The blade pitch is mainly distributed in the range of 1.2D to 1.6D, and the blade tip chord length is mainly distributed in the range of 0.25D to 0.3D.
ConclusionThe results of this study can provide valuable references for the design efficiency of rim-driven thrusters.
-
0. 引 言
船舶噪声源主要分为机械噪声、螺旋桨噪声和水动力噪声[1],而螺旋桨噪声是船舶工作的主要噪声来源[2,3],其辐射噪声频率范围与多种海洋动物的发声、听觉频率范围重合,可对海洋生物产生显著的负面影响[4,5]。此外,外露的桨叶容易对海洋鱼类造成伤害,还会对近岛礁浅水海底产生冲刷危害。为了解决船舶推进系统对海洋生物和环境造成的恶劣影响,船舶和推进轴系大型化导致了占用空间大、结构复杂、能量传递损耗大等问题,增加了船舶设计难度和建造成本。因此,特种推进装置的研发[6-8]受到了人们的关注。在此背景下,轮缘推进器(rim-driven thruster, RDT)的概念应运而生。尽管该推进器概念可追溯到Kort[9]和Saunders[10]的研究工作,但因结构复杂、指标互斥和设计难度大,制约了轮缘推进器性能发挥及工程化应用。近年来,随着技术的快速发展,轮缘推进器的应用成为可能。例如,轮缘推进器中的永磁转子被安装在轮缘上,电机转子与叶片集成为一体[11],消除了推进器叶片尾流梢涡,显著减少了推进器引起的振动与噪声[12-13]。然而,与被大量研究的螺旋桨相比,轮缘推进器在构型设计和性能方面面临许多挑战。目前,大多数研究致力于轮缘推进器电机系统的设计和分析[14]或关注叶片振动的相关问题[15],鲜有关注叶片设计、水动力性能和噪声性能[16-18]。
本文将根据之前工作中提出的一种零侧斜、零纵斜、等螺距的半椭圆投影轮廓的无轴轮缘推进器设计方案[19],通过改变叶片的主要影响参数叶片螺距和叶梢弦长,研究其对轮缘推进器水动力性能和噪声性能的影响。轮缘推进器可在不牺牲推进效率的情况下提高无空泡速度[20],永磁电机和轮缘使轮缘推进器拥有更好的梢端负载和空化性能[21]。同时,之前工作设计的方案采用梭形切面,减压系数小于机翼型切面,使得轮缘推进器更不易发生空泡现象。基于此,本文进一步采用URANS/IDDES/LES湍流模型结合可渗透面FW-H方程(P-FWH)的混合方法在均匀流和无空化条件下开展轮缘推进器的水动力性能和噪声性能数值研究,并对其尾迹演化予以讨论。
1. 数值模型
1.1 控制方程
1.1.1 湍流模型
本文采用非定常不可压缩流雷诺平均(RANS)、分离涡(DES)和大涡(LES)模拟对流场进行求解,同时采用滑移网格模型考虑推进器的旋转运动。在RANS和DES求解时均选取了SST k-ω湍流模型[22],RANS方法中对流项采用了二阶迎风格式进行离散。在DES求解时采用了IDDES湍流模型进行[23],对流项采用了混合有界中心差分格式进行离散。在LES求解时选取Smagorinsky亚格子模型[24],von Karman常数取为0.41,模型系数CS取为0.1,对流项采用有界中心差分格式。对于上述计算过程,采用有限体积法(FVM)进行离散,瞬时项采用二阶隐式非定常方法,并采用全y+壁面处理方法[25]。压力速度耦合采用SIMPLE算法迭代求解。根据ITTC规程中库朗数(CFL)建议[26],本文数值计算中每个时间步对应的转子旋转角度小于1°(即CFL < 1.0)。
1.1.2 声学模型
本文采用的P-FWH方法在计算非线性项时无需进行体积分, 从而大幅度降低计算成本。可渗透区域包括螺旋桨和螺旋桨尾迹,其中非线性效应非常重要。因此,在P-FWH方程中Farassat 1A公式的单极子和偶极子噪声项成为包含四极子项贡献的“伪单极子项”和“伪偶极子项”[27]。在不可压缩假设下,P-FWH方程写成如下形式[28-29]:
4{\text{π}}p(x,t) = \int\limits_S {\frac{{{\rho _{\text{0}}}{{\dot U}_{\text{n}}}}}{r}} {\rm{d}}S + \int\limits_S {\frac{{{{\dot {\boldsymbol{L}}}_{\text{r}}}}}{{{c_{\text{0}}}r}}} {\rm{d}}S + \int\limits_S {\frac{{{{\boldsymbol{L}}_{\text{r}}}}}{{{r^2}}}} {\rm{d}}S + {p_{\text{Q}}}(x,t) 式中,ρ0为远场密度;U为速度;L为应力张量;c0是声速;r是噪声源和接收器之间的距离,m;下标r和n分别定义了在辐射方向和法线方向上的点积;S为积分表面;PQ(x, t)表示可渗透面外噪声源的非线性贡献。可渗透表面的延伸几乎包含了所有相关的非线性噪声源,因此与文献[29-31]的研究类似,本文研究忽略可渗透区域之外的非线性贡献。
1.2 计算域和边界条件
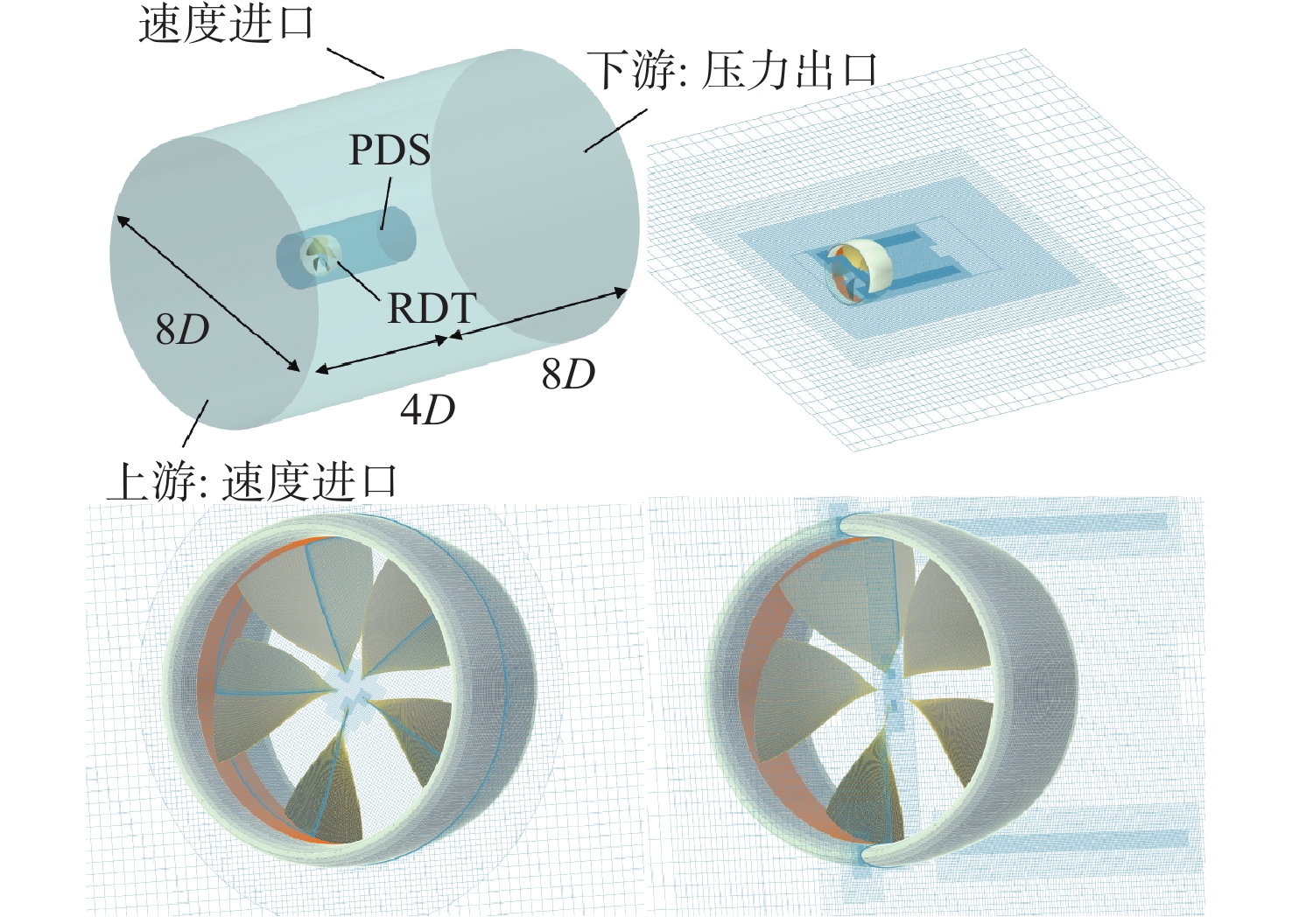
在计算中,采用如图1所示的圆柱形计算域,该计算域由静止外域和旋转内域组成。计算域径向尺寸为8D(D表示推进器直径),从推进器中心向上游4D,向下游8D以允许推进器尾迹流动演化,并尽可能降低杂散噪声。旋转域和静止域之间通过滑移交界面过渡。可渗透表面置于交界面区域外,以尽可能包含相关的非线性噪声贡献。
![]() 图 1 数值计算域及其边界条件(参考网格)Figure 1. Numerical computational domain and boundary conditions (reference grid)
图 1 数值计算域及其边界条件(参考网格)Figure 1. Numerical computational domain and boundary conditions (reference grid)1.3 数值方法验证和不确定度分析
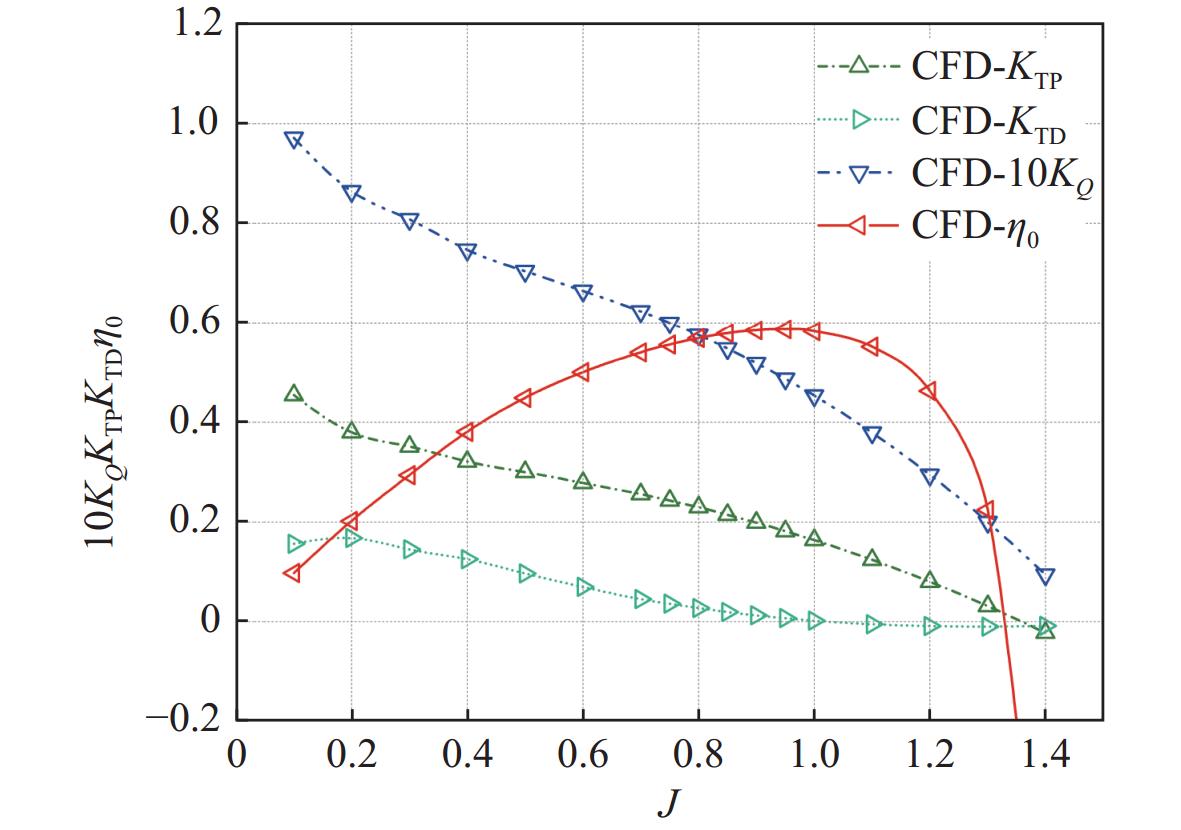
对推进器的无量纲系数说明如下:在传统螺旋桨中,10KQ代表叶片的扭矩系数,KT代表叶片的推力系数;而在轮缘推进器中,10KQ代表叶片和轮缘的扭矩系数,KTP代表叶片的推力系数,KTD代表导管的推力系数,KTR代表轮缘的推力系数。由于本研究中对轮缘进行了简化,因此将KTR和KTD合并为KTD进行表述。
图1所示参考网格的局部网格采用具有不同各向同性大小的细化体积来捕获基本流动特征。轮缘推进器的叶片和轮缘表面最大尺寸为5e-4 m(即0.47%D),最小尺寸为1e-4 m(即0.09%D);外导管表面最大尺寸1.25e-3 m(即1.17%D),最小尺寸1e-4 m(即0.09%D);推进器旋转区域为1e-3 m(即0.94%D),推进器和近中尾流区域为2.5e-3 m(即2.35%D);叶梢近中尾流区域为5e-4 m(即0.47% D);远尾流区域为5e-3 m(即4.69%D)。
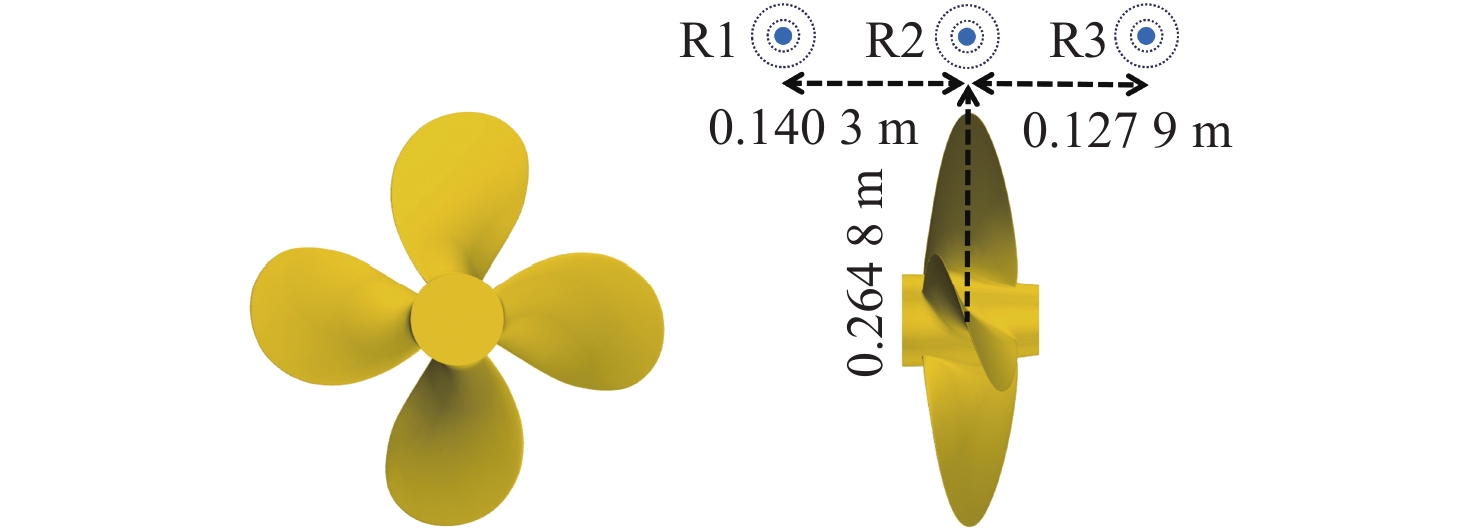
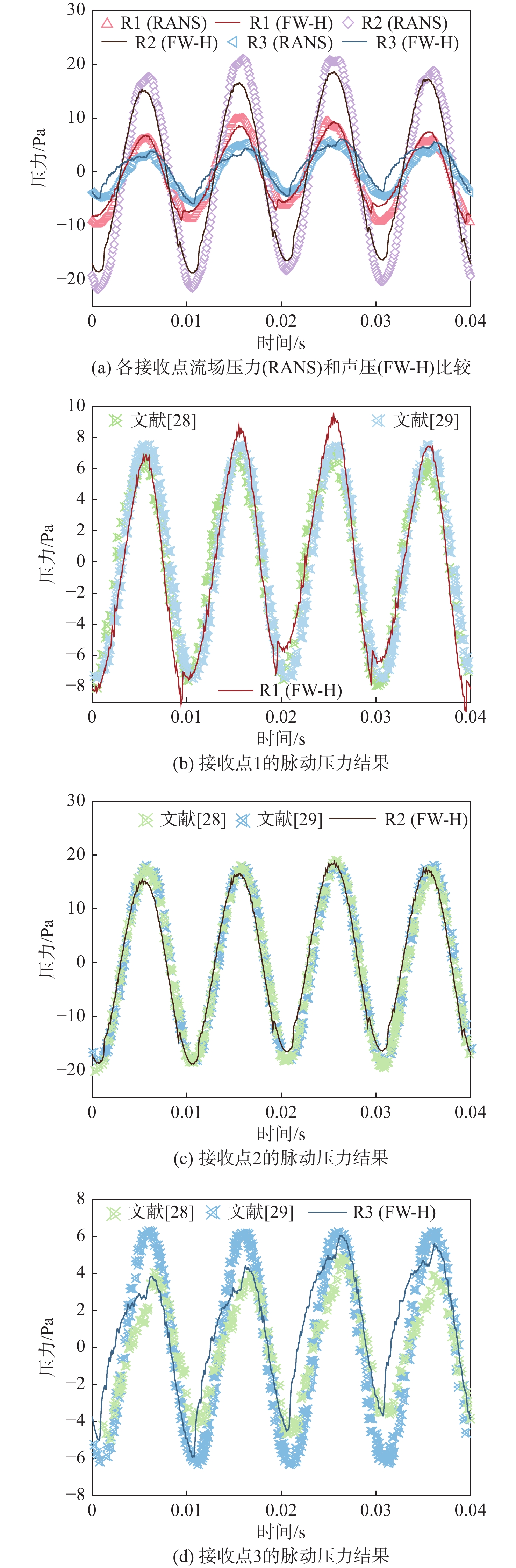
首先,采用参考网格配置对图2所示(图中R1, R2, R3表示接收点)INSEAN E779A螺旋桨在进速系数J=0.88时进行研究,计算结果KT=0.149 (试验值EFD=0.151), 10KQ=0.304 (EFD=0.305)。同时,将预报的水下辐射噪声结果与文献[29-30]的数据进行对比,螺旋桨旋转一圈的脉动压力结果如图3所示。
![]() 图 2 INSEAN E779A螺旋桨几何和接收点位置Figure 2. INSEAN E779A propeller geometry and receiver points
图 2 INSEAN E779A螺旋桨几何和接收点位置Figure 2. INSEAN E779A propeller geometry and receiver points![]() 图 3 脉动压力预报结果与文献数据比较Figure 3. Comparison of pressure prediction results with literature data
图 3 脉动压力预报结果与文献数据比较Figure 3. Comparison of pressure prediction results with literature data然后,建立与参考网格具有相同分布、不同密度的2套网格方案(表1),其中相邻2套网格方案的细化比rG= \sqrt{2} ,共3套网格方案采用修正因子法[32]和网格收敛指数法[33]对原型设计方案(进速系数J=1,转速n=600 r/min的工况下)进行不确定度分析,结果如表2所示。表中:RG为收敛速率,PG和P为准确度阶数估计,CG为修正因子,USN为数值不确定度,e为近似相对误差的无量纲形式,GCI为邻近网格方案的网格指数。各物理量的下标1,2,3分别代表细、参考和粗网格密度。从图3中的脉动压力预报结果可见,数值预报结果与文献数据吻合较好,不确定度分析中USN和GCI小于3%,说明本文数值预报方法较为准确和可靠。因此,后续研究中,本研究采用图1中的参考网格进行。
表 1 轮缘推进器原型设计网络方案Table 1. Grid schemes of rim-driven thruster prototype网格方案 网络数量 粗网格 6.27×106 参考网格 12.13×106 细网格 24.27×106 表 2 轮缘推进器原型设计的网格方案不确定度分析Table 2. Uncertainty analysis of rim-driven thruster prototype design修正因子法 网格收敛指数法 RG PG CG USN (%S1) P e21 /% e32 /% GCI21 /% GCI32 /% 10KQ 0.03 5.04 31.80 1.36 10.07 0.02 0.75 0.00 0.03 KTD 0.00 9.80 889.87 2029.08 19.60 0.04 65.45 0.00 0.09 KTP 0.06 4.08 15.88 1.33 8.15 0.09 1.49 0.01 0.12 2. 计算结果分析
2.1 原型设计方案的水动力性能和噪声性能
本文对轮缘间隙进行了简化处理,初步设计了一个图4所示的原型方案,主要参数见表3。原型方案在敞水下各进速系数工况下的水动力性能特征,如图5所示。原型方案在高负载工况时,导管推力为正值,提升了推进器的推进效率。在低负载工况时,导管受力约为零。尽管研究是在无空化条件下进行的,但考虑到推进效率与空化性能的平衡,后续研究中采用了零推力导管工况(J=1)进行。
表 3 轮缘推进器主要参数Table 3. Main parameters of rim-driven thruster参数 数值 直径D/m 0.1066 螺距比P/D 1.2 叶片数 5 纵斜/(°) 0 侧斜/(°) 0 ![]() 图 5 轮缘推进器原型方案敞水下的水动力性能Figure 5. Hydrodynamic performance of rim-driven thruster prototype in open water
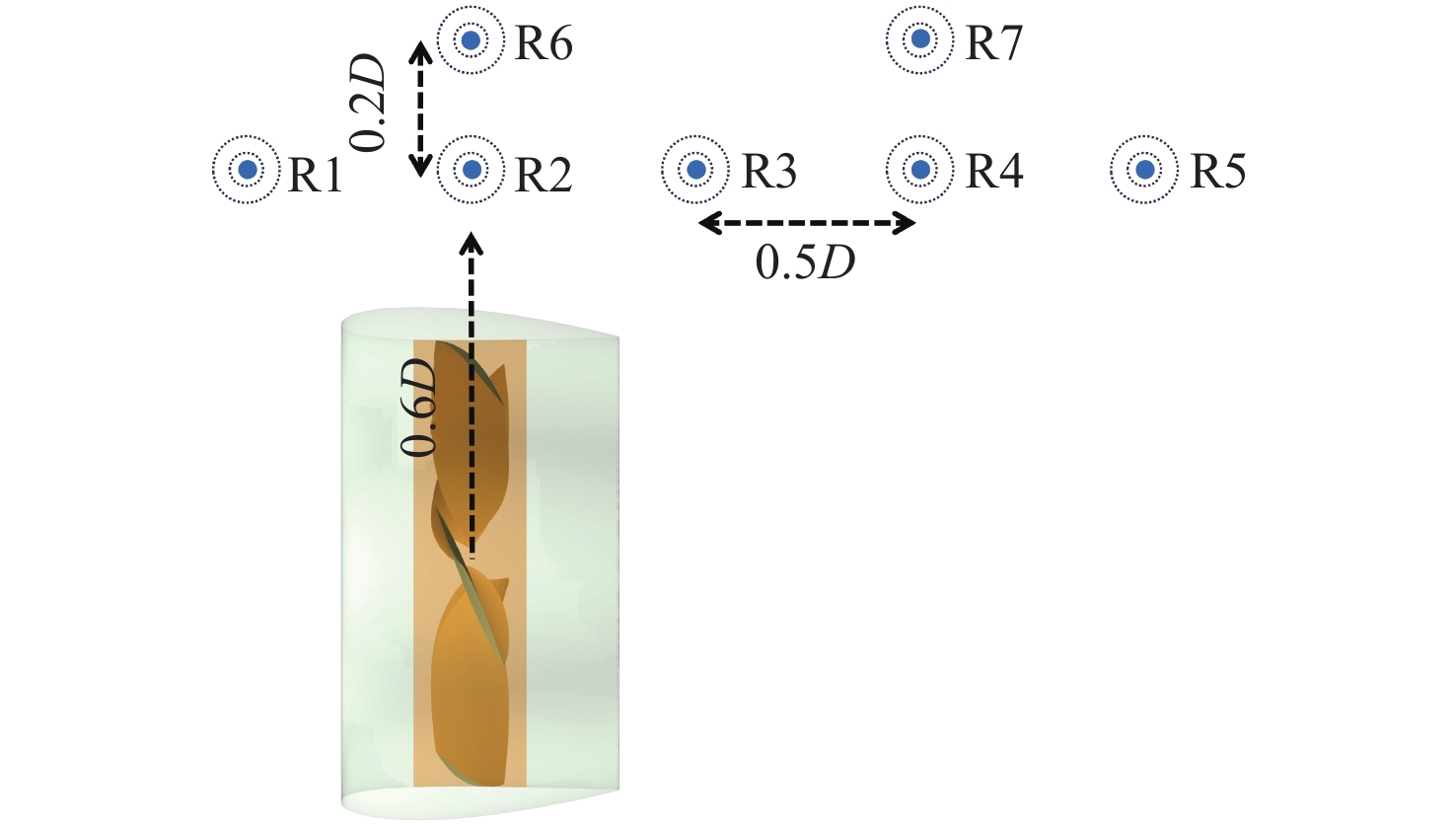
图 5 轮缘推进器原型方案敞水下的水动力性能Figure 5. Hydrodynamic performance of rim-driven thruster prototype in open water为了采用频谱分析轮缘推进器所提供的水下辐射噪声水平,计算过程中对靠近推进器及其尾迹的一定数量的接收点(如图6所示R1~R7)进行了脉动压力采样,使用傅里叶分析并对时间历程进行处理,提取出频域中最相关的特征。
在进速系数J=1, n=600 r/min的工况下开展原型方案在40 kHz频带内的噪声性能研究,以及将预报结果通过相似换算方程[1,34, 35]与文献[35] 中40 kHz频带内的轮缘推进器噪声试验结果进行了比较。本文1/3倍频程声压级1 m处预报结果为106.76 dB (dB re 1μPa2),与文献[35]的无空化条件下(n=540 r/min、直径0.2 m)轮缘推进器噪声试验结果(107.32 dB)相差0.56 dB。考虑到2个轮缘推进器的转速与几何差异以及相似换算误差,该对比结果从声压级的数值大小上验证了本研究数值预报方法的可靠性。
2.2 设计参数螺距和弦长对推进器性能的影响
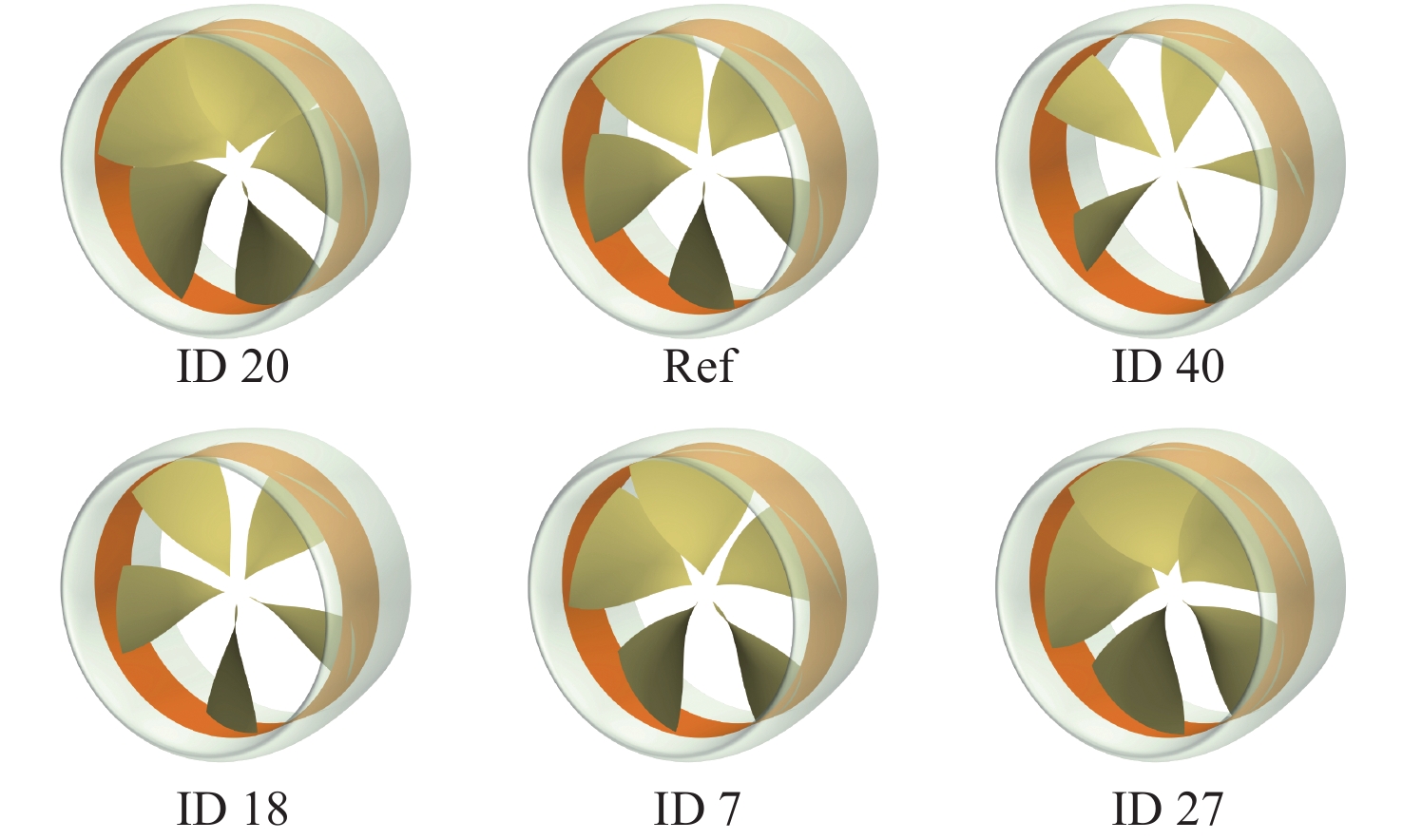
为保证选取样本的合理性,本节在轮缘推进器叶片设计参数取值范围内采用了最优拉丁超立方抽样方法,抽取样本数量为20k+2(k为设计参数数量),即42个设计方案,各设计参数取值范围如表4所示,并将部分设计方案样本展示于图7中。图中,ID表示设计样本的编号。
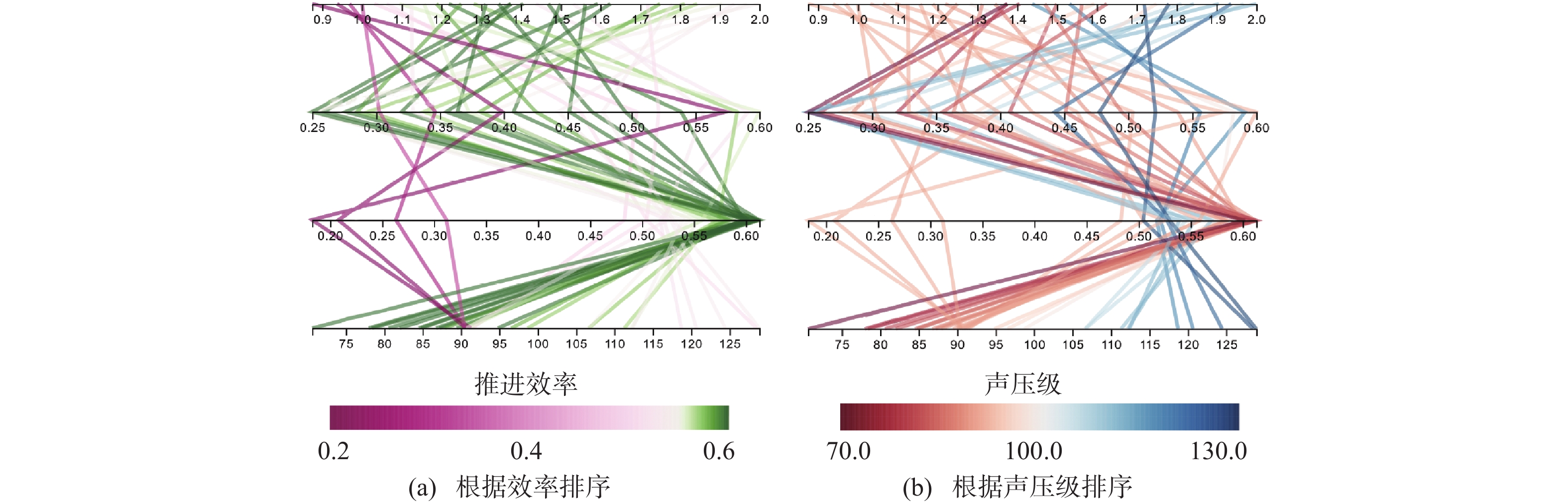
表 4 推进器叶片设计参数取值范围Table 4. The range of value taken for thruster blade design parameters设计参数 最小值 最大值 原型方案 叶梢弦长 0.25D 0.6D 0.4D 螺距 0.75D 2D 1.2D 使用URANS和SST k-ω湍流模型采用参考网格分别对抽样得到的设计方案进行水动力性能和噪声性能的预报,除去部分无效设计方案(即效率低于0),将有效结果通过平行坐标图呈现于图8中。前期研究中,辐射噪声主要集中在以叶频为基频的前5阶叶频内,轮缘推进器的叶频为50 Hz,需涵盖0~250 Hz的范围,故本文对各设计方案在500 Hz范围内进行了分析。图8(a)中,使用彩色线条的颜色和透明度对推进效率从最糟糕设计至最佳设计进行了排序,其中粉红色代表较为糟糕的设计,绿色代表较为优良的设计,颜色较淡的区域属于一般设计,颜色越深代表越接近极值。因此,通过线条颜色和透明度可以判断其设计效果。同理,在图8(b)中对接收点2(R2)在500 Hz频带范围内的声压级分布进行了排序,其中红色线条表示较为优良的设计,而蓝色线条表示较为糟糕的设计,颜色较淡的区域属于一般设计,颜色越深代表越接近极值。
![]() 图 8 样本设计方案的设计参数与性能参数的对应关系Figure 8. Correspondence between design parameters and performance parameters of sample design solutions
图 8 样本设计方案的设计参数与性能参数的对应关系Figure 8. Correspondence between design parameters and performance parameters of sample design solutions当设计参数螺距逐步增大时,所设计的方案推进效率表现出先升后降的趋势,声压级表现出先降后升的趋势。对于高效低噪声需求而言,推进效率升高与声压级降低趋势相同,这说明螺距对水动力性能和噪声性能的影响是相似的。
图8(a)中,对于较好推进效率设计方案(即推进效率η0在60%附近),螺距集中分布于1.2D~1.6D区间。该范围大部分设计方案的推进效率处于60%附近,相比其他范围内的设计方案,效率增加了约1.5%~42%,相比原型方案增加了约0.5%~3%。
图8(b)中,对于较好辐射噪声设计方案(即声压级SPLR2低于90 dB),螺距集中分布在1.3D~1.4D区间。该范围大部分设计方案的声压级处于90 dB以下,相比其他范围内的设计方案,声压级降低了约3~35 dB。此外,当螺距小于1.2D时,大部分设计方案的推进效率在20%左右,部分设计方案低于20%,水动力性能表现较糟糕,声压级在90~95 dB范围内,噪声性能表现一般;当螺距大于1.6D时,大部分设计方案的推进效率处于50%~55%范围内,水动力性能表现一般,声压级处于120 dB附近,部分设计方案在130 dB以上,噪声性能表现糟糕。
当设计参数弦长逐步增大时,所设计的方案推进效率表现出先减后增再减再增的趋势,而声压级表现出逐步增大的趋势。显然,相比噪声性能参数,水动力性能参数受设计参数弦长的影响较为复杂。
图8(a)中,当弦长在0.25D~0.3D区间时,大部分设计方案的推进效率处于60%附近,相比其他范围内的设计方案,效率增加了约0.5%~42%,相比原型方案增加了约2%~3%。
图8(b)中,当弦长在0.25D~0.3D处于时,大部分设计方案的声压级在85 dB以下,相比其他范围内的设计方案,声压级降低了约2~40 dB。此外,当弦长大于0.3D时,部分设计方案的推进效率在55%以上,声压级处于90 dB附近,存在少量水动力和噪声性能均表现较好的设计方案;当弦长处于0.5D~0.6D区间时,推进效率和噪声性能表现不佳的设计方案较多。
综上所述,在1.2D~1.6D区间的大部分设计方案的推进效率在55%以上,声压级在90 dB以下,这些设计方案的水动力和噪声性能表现较好。对于推进效率在55%以上和声压级在85 dB以下的设计方案,弦长主要分布在较低区域。水动力性能参数和噪声性能参数受设计参数螺距的影响趋势较为相似,在中部区域有着较好表现;水动力性能参数和噪声性能参数受设计参数弦长的影响也较为相似,在较低区域和中部区域有着较好表现。因此,在考虑高效低噪设计需求时,对于设计参数螺距可适当选取在中部区域(1.2D~1.6D区间)。而对于设计参数弦长,可根据设计需求适当选取在较低区域(0.25D~0.3D区间)或中部区域。该结论可为轮缘推进器高效低噪的高性能设计提供参考。
需要说明的是,由于样本空间和数量限制,且各设计参数间存在相互影响,轮缘推进器性能受叶片设计参数的影响分析较为宏观,需要更多的数据集进行补充,得到更精细的结论。
2.3 典型设计方案声学特性和尾迹流场分析
选取2.2节抽样取得样本中推进效率最佳而噪声性能差异明显的2个设计方案(ID 18: SPLR2=78.40 dB, η0=0.61、ID 7: SPLR2=87.23dB, η0=0.61),最糟糕推进效率设计方案(ID 27: SPLR2=91.31dB, η0=0.17)在2.5 kHz频带范围内对其声学特性和流场特性进行了分析,数值计算结果整理于表5中。
表 5 水动力性能和噪声性能参数Table 5. Hydrodynamic and hydroacoustic performance parameters求解方法 设计方案 KTP KTD 10KQ SPLR2 η0 URANS ID 18 0.21 0.01 0.59 102.14 0.61 ID 7 0.24 0.02 0.69 107.88 0.61 ID 27 0.03 −0.01 0.19 95.88 0.17 IDDES ID 18 0.21 0.01 0.58 109.06 0.61 ID 7 0.24 0.02 0.68 114.59 0.60 ID 27 0.02 −0.01 0.17 95.91 0.12 LES ID 18 0.19 0.01 0.53 111.51 0.62 ID 7 0.23 0.02 0.62 111.35 0.63 ID 27 0.00 −0.01 0.13 113.96 -0.07 计算结果中,由于不同湍流模型对于近壁面区域的处理和核心区域的求解方式不同,导致了噪声预报结果的差异。由表5中数据可知,IDDES和LES的水动力性能预报结果与URANS偏差不大。以URANS噪声预报结果为参考,对于设计方案ID 18,IDDES噪声预报结果增加了6.92 dB,LES噪声预报结果增加了9.37 dB;对于设计方案ID 7,IDDES噪声预报结果增加了6.71 dB,LES噪声预报结果增加了3.47 dB;对于设计方案ID 27,IDDES噪声预报结果增加了0.03 dB,LES噪声预报结果增加了18.08 dB。此外,与原型设计方案URANS预报结果相比,设计ID 18声压级降低了10.12 dB,设计ID 7声压级降低了4.38 dB,设计ID 27降低了16.38 dB。
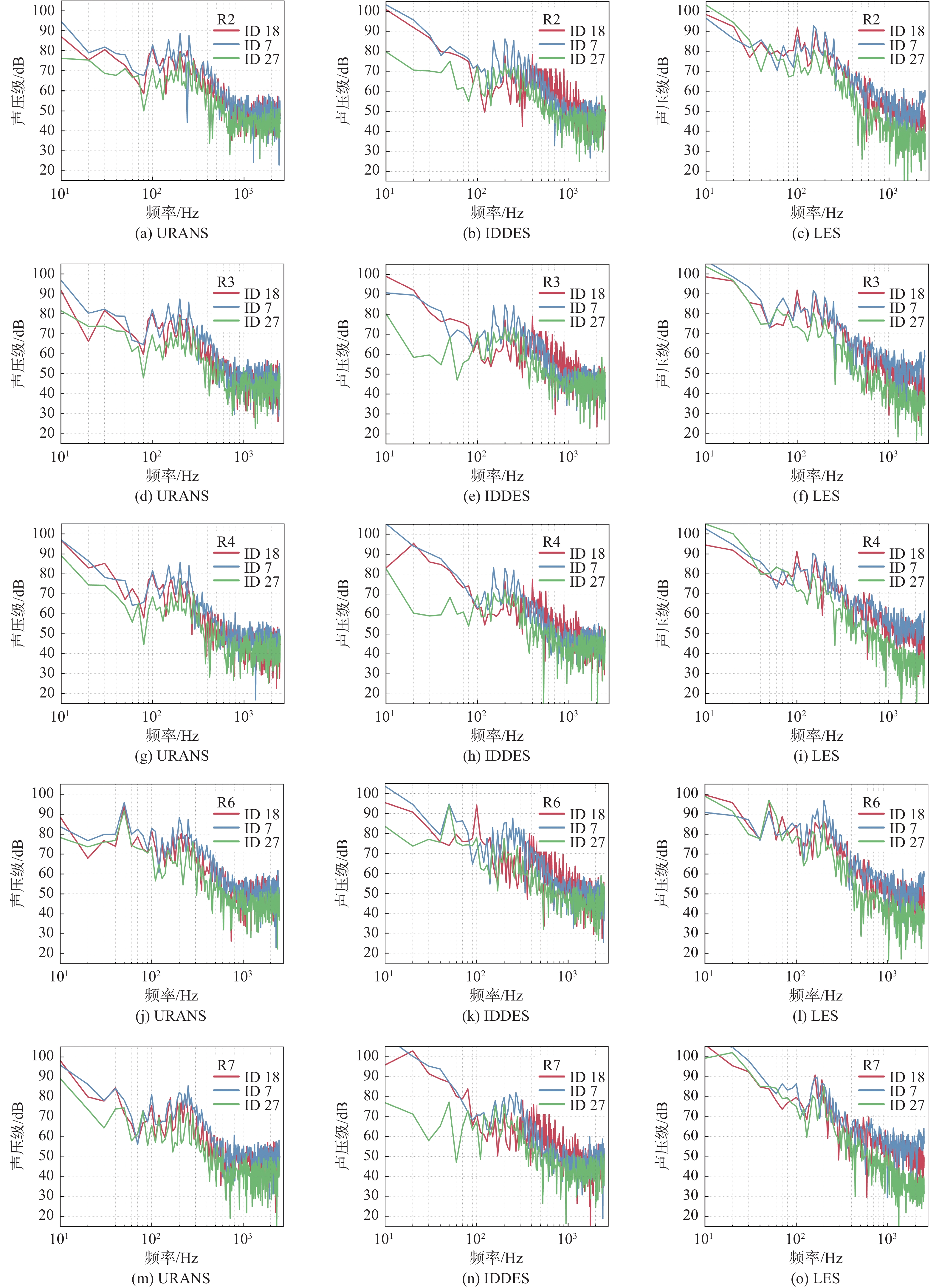
在2.5 kHz频带范围内,设计方案ID 18和ID 7在噪声性能上的差异,没有500 Hz频带范围的差异明显,且同样是ID 18优于ID 7。而设计方案ID 27在2.5 kHz频带范围时,在噪声性能上优于前2个设计方案,但其水动力性能表现糟糕。本研究将各设计方案的接收点(R2,R3,R4,R6,R7)在2.5 kHz频带范围内的声压级频谱整理为图9。
![]() 图 9 各设计方案的声压级频谱(接收点R2,R3,R4,R6,R7)Figure 9. Sound pressure level spectrum for each scheme (receiver points 2, 3, 4, 6, 7)
图 9 各设计方案的声压级频谱(接收点R2,R3,R4,R6,R7)Figure 9. Sound pressure level spectrum for each scheme (receiver points 2, 3, 4, 6, 7)比较各阶叶倍频对应的声压级可知,轮缘推进器的辐射噪声能量主要集中在前五阶谐波内,特别是一阶谐波和二阶谐波。在均匀流条件下,一阶谐波是由于叶片通过造成,其他谐波可以归因于叶片与尾迹湍流的相互作用,泄露涡流使压力脉动频率增加,其他涡流的相互作用则决定了更高频率的峰值[19]。
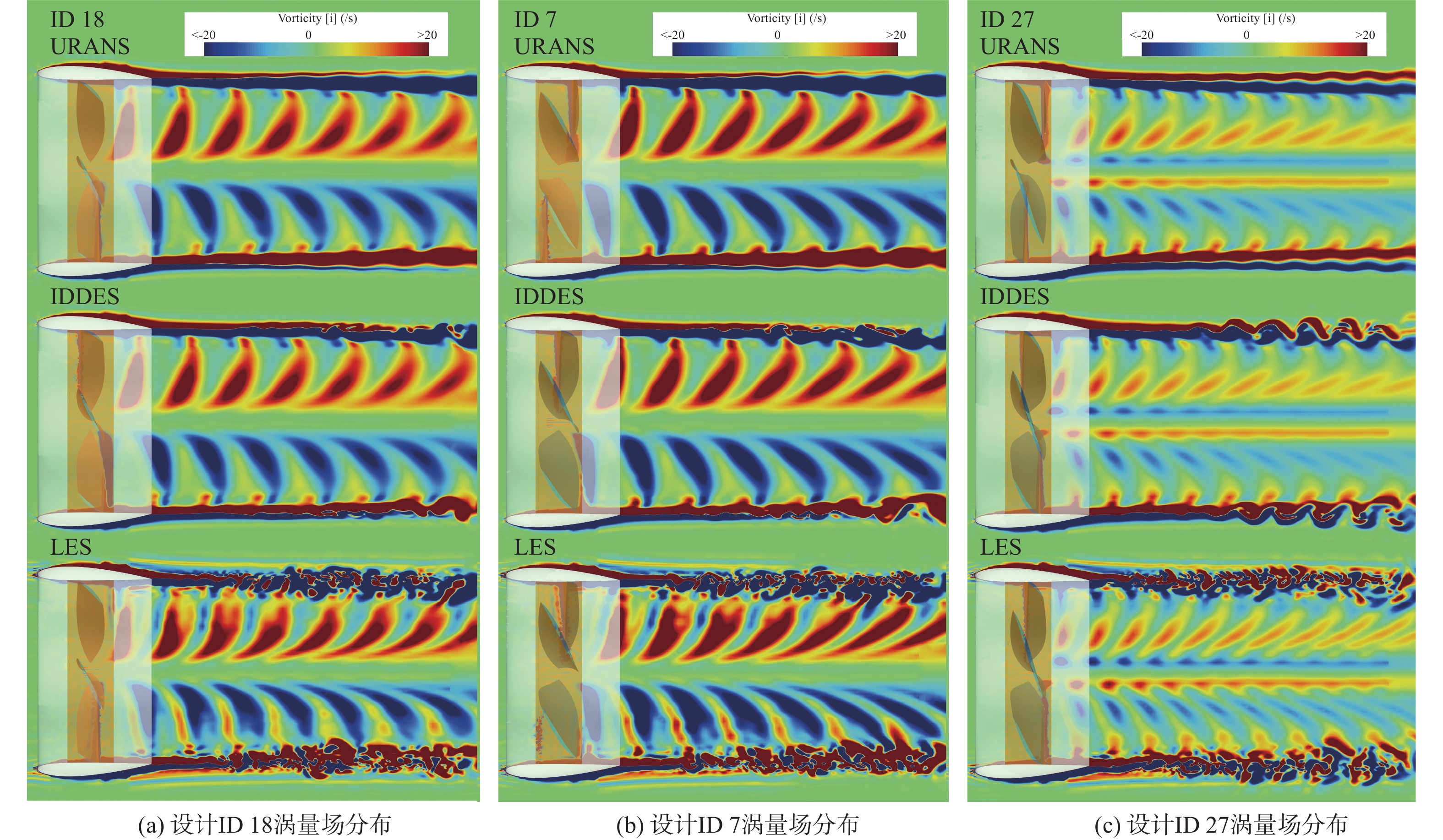
对于一阶谐波,靠近推进器的接收点在相同的载荷下,位移效应具有更大的影响,导致了谐波峰值差异。例如接收点R2和R6的声压级频谱中一阶谐波处声压级有着较大差异,而对于二阶谐波的影响要低得多。此外,由于轮缘推进器的梢涡强度较弱且缺乏强连贯性的二次螺旋涡流,在轮缘推进器的涡旋结构中无法看到周期性的相互作用(图10)。
在远离推进器平面处,URANS预报的涡量强度较弱,并且缺少二次涡流及其相互作用。二次涡流通常将较低的脉动压力分配到更高的频率和非倍频上。这导致了预报的噪声水平较低,并且低估了宽带噪声。在IDDES和LES的噪声结果中,可以明显观察到在高频区域出现了上升。例如接收点R7的声压级频谱中,设计方案ID 18和ID 7在高频区域的声压级峰值上升较为明显。
图10中,由于轮缘推进器的非常规几何形状,叶梢泄露涡流的演化和作用与传统螺旋桨的已有研究存在差异。同时,在轮缘推进器的尾迹在叶根部位出现了叶片泄露涡流和叶根涡流形成的合并涡流现象,但其涡量强度较弱。
水下辐射噪声结果表明,存在涡流失稳现象时,水下压力场受到了显著的影响。各设计方案在不同湍流模型下涡量强度分布可以证实这一点,尤其是ID 27。ID 27在流场中的表现特征和前2个设计方案具有较大差异,这也解释了表4中不同湍流模型计算偏差较大的原因。同时,ID 27尾迹涡量的耗散速度明显较快,这也是其噪声性能表现优异的原因。各个设计方案的求解中,URANS求解的尾迹涡量场分布较为稳定。IDDES求解的尾迹捕获到了明显的失稳现象,这也导致了声压级增加。这一现象在LES求解的尾迹中更为明显,捕获到了涡流破碎现象,同时也导致了噪声性能的急剧下降。
因此,尾迹中涡流失稳和破碎现象可能是无空化工况下非线性噪声源的主要影响因素。需要注意的是,目前基于RANS的混合方法仅适用于螺旋桨水下辐射噪声预报的初步设计阶段。此外,Sezen[29]等人的研究表明使用不同的湍流模型对螺旋桨尾迹水下辐射噪声预报结果略有不同。RANS对于涡核内部流动、失稳过程等流动细节的捕获能力不足,这也会造成噪声预报水平的差异。因此,应采用更加精细的尺度解析仿真(例如SAS/DES/LES等)与FW-H方程一起进行更深入的研究。
3. 结 论
本文在均匀流和无空化条件下开展了轮缘推进器的水动力性能和噪声性能数值研究,选取了部分案例进行讨论。研究内容可为轮缘推进器的设计效率提供支持,同时丰富了轮缘推进器在水下辐射噪声领域的研究。研究得到了如下结论:
1) 对于叶片参数螺距而言,推进效率高于55%,500 Hz频带内声压级低于90 dB的设计方案主要分布在1.2D ~ 1.6D范围。与其他范围的设计方案相比,效率增加了约1.5%~42%。声压级降低了约3~35 dB。与轮缘推进器原型设计方案相比,推进效率增加了约0.5%~3%。
2) 对于叶片参数弦长而言,推进效率高于55%,500 Hz频带内声压级低于85 dB的设计方案主要分布在1.2D~1.6D范围。与其他范围的设计方案相比,效率增加了约0.5%~42%。声压级降低了约2~40 dB。与轮缘推进器原型设计方案相比,推进效率增加了约2%至3%。
3) IDDES和LES的水动力性能预报结果与URANS偏差不大,但噪声预报结果偏差较大。在2.5 kHz频带范围内,对于设计ID 18,IDDES声压级增加了6.92 dB,LES声压级增加了9.37 dB;对于设计ID 7,IDDES声压级增加了6.71 dB,LES声压级增加了3.47 dB;对于设计ID 27,IDDES声压级增加了0.03 dB,LES声压级增加了18.08 dB。此外,与原型设计方案URANS在2.5kHz频带范围的预报结果相比,设计ID 18声压级降低了10.12 dB,设计ID 7声压级降低了4.38dB,设计ID 27降低了16.38 dB。
本研究不足之处是仅考虑了敞水条件下的推进器性能,后续将重点研究水面船舶推进系统的水下辐射噪声性能表现。
-
![]()
图 1 数值计算域及其边界条件(参考网格)
Figure 1. Numerical computational domain and boundary conditions (reference grid)
![]()
图 2 INSEAN E779A螺旋桨几何和接收点位置
Figure 2. INSEAN E779A propeller geometry and receiver points
![]()
图 3 脉动压力预报结果与文献数据比较
Figure 3. Comparison of pressure prediction results with literature data
![]()
图 5 轮缘推进器原型方案敞水下的水动力性能
Figure 5. Hydrodynamic performance of rim-driven thruster prototype in open water
![]()
图 8 样本设计方案的设计参数与性能参数的对应关系
Figure 8. Correspondence between design parameters and performance parameters of sample design solutions
![]()
图 9 各设计方案的声压级频谱(接收点R2,R3,R4,R6,R7)
Figure 9. Sound pressure level spectrum for each scheme (receiver points 2, 3, 4, 6, 7)
表 1 轮缘推进器原型设计网络方案
Table 1 Grid schemes of rim-driven thruster prototype
网格方案 网络数量 粗网格 6.27×106 参考网格 12.13×106 细网格 24.27×106  下载: 导出CSV
下载: 导出CSV
表 2 轮缘推进器原型设计的网格方案不确定度分析
Table 2 Uncertainty analysis of rim-driven thruster prototype design
修正因子法 网格收敛指数法 RG PG CG USN (%S1) P e21 /% e32 /% GCI21 /% GCI32 /% 10KQ 0.03 5.04 31.80 1.36 10.07 0.02 0.75 0.00 0.03 KTD 0.00 9.80 889.87 2029.08 19.60 0.04 65.45 0.00 0.09 KTP 0.06 4.08 15.88 1.33 8.15 0.09 1.49 0.01 0.12
下载: 导出CSV
表 3 轮缘推进器主要参数
Table 3 Main parameters of rim-driven thruster
参数 数值 直径D/m 0.1066 螺距比P/D 1.2 叶片数 5 纵斜/(°) 0 侧斜/(°) 0
下载: 导出CSV
表 4 推进器叶片设计参数取值范围
Table 4 The range of value taken for thruster blade design parameters
设计参数 最小值 最大值 原型方案 叶梢弦长 0.25D 0.6D 0.4D 螺距 0.75D 2D 1.2D
下载: 导出CSV
表 5 水动力性能和噪声性能参数
Table 5 Hydrodynamic and hydroacoustic performance parameters
求解方法 设计方案 KTP KTD 10KQ SPLR2 η0 URANS ID 18 0.21 0.01 0.59 102.14 0.61 ID 7 0.24 0.02 0.69 107.88 0.61 ID 27 0.03 −0.01 0.19 95.88 0.17 IDDES ID 18 0.21 0.01 0.58 109.06 0.61 ID 7 0.24 0.02 0.68 114.59 0.60 ID 27 0.02 −0.01 0.17 95.91 0.12 LES ID 18 0.19 0.01 0.53 111.51 0.62 ID 7 0.23 0.02 0.62 111.35 0.63 ID 27 0.00 −0.01 0.13 113.96 -0.07
下载: 导出CSV
-
[1] ITTC. Specialist committee on hydrodynamic noise-finalreport and recommendations [C]//Proceedings of the 27th International Towing Tank Conference. Copenhagen, Denmark: ITTC 2014.
[2] CRUZ E, LLOYD T, LAFEBER F H, et al. The SOUNDS project: towards effective mitigation of underwater noise from shipping in Europe[J]. Proceedings of Meetings on Acoustics, 2022, 47(1): 070021.
[3] TRANSPORT CANADA. Quieting ships to protect the marine environment[R]. Cambridge: ACENTECH Inc. , 2019.
[4] DUARTE C M, CHAPUIS L, COLLIN S P, et al. The soundscape of the Anthropocene ocean[J]. Science, 2021, 371(6529): eaba4658. doi: 10.1126/science.aba4658
[5] SØRENSEN P M, HADDOCK A, GUARINO E, et al. Anthropogenic noise impairs cooperation in bottlenose dolphins[J]. Current Biology, 2023, 33(4): 749-754. e4.
[6] ANDERSEN S V, ANDERSEN P. Hydrodynamic design of propellers with unconventional geometry[J]. Royal Institution of Naval Architects Transactions, 1987.
[7] GAGGERO S, GONZALEZ-ADALID J, SOBRINO M P. Design of contracted and tip loaded propellers by using boundary element methods and optimization algorithms[J]. Applied Ocean Research, 2016, 55: 102–129. doi: 10.1016/j.apor.2015.12.004
[8] GAGGERO S, GONZALEZ-ADALID J, SOBRINO M P. Design and analysis of a new generation of CLT propellers[J]. Applied Ocean Research, 2016, 59: 424–450. doi: 10.1016/j.apor.2016.06.014
[9] KORT L. Elektrisch Angetriebene Schiffsschraube: DE688114[P]. 1940-02-13. https://www.freepatentsonline.com/DE3246730A1.html.
[10] SAUNDERS, H. Hydrodynamics in ship design[M]. Jersey City, NJ: Society of Naval Architects and Marine Engineers, 1957.
[11] ABU SHARKH S M, TURNOCK S R, HUGHES A W. Design and performance of an electric tip-driven thruster[J]. Proceedings of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment, 2003, 217(3): 133–147. doi: 10.1243/147509003322255840
[12] 谈微中, 严新平, 刘正林, 等. 无轴轮缘推进系统的研究现状与展望[J]. 武汉理工大学学报(交通科学与工程版), 2015, 39(3): 601–605. TAN W Z, YAN X P, LIU Z L, et al. Technology development and prospect of shaftless rim-driven propulsion system[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2015, 39(3): 601–605 (in Chinese).
[13] YAN X P, LIANG X X, OUYANG W, et al. A review of progress and applications of ship shaftless rim-driven thrusters[J]. Ocean Engineering, 2017, 144: 142–156. doi: 10.1016/j.oceaneng.2017.08.045
[14] HUGHES A W, ABU SHARKH S, TURNOCK S R. Design and testing of a novel electromagnetic tip-driven thruster[C]//Proceedings of the 10th International Offshore and Polar Engineering Conference. Seattle: OnePetro, 2000.
[15] CHEN Y, WANG L, HUA H X. Longitudinal vibration and unsteady thrust transmission of the rim driven thruster induced by ingested turbulence[J]. Ocean Engineering, 2017, 131: 149–161. doi: 10.1016/j.oceaneng.2017.01.001
[16] 王雨楠. 桨叶参数对轮缘推进器水动力性能影响分析[D]. 大连: 大连理工大学, 2022. WANG Y N. Influence of blade parameters on hydrodynamic performance of rim-driven thruster[D]. Dalian: Dalian University of Technology, 2022 (in Chinese).
[17] 徐鹏宇. 基于响应面模型的无轴轮缘推进器优化设计方法[D]. 大连: 大连理工大学, 2020. XU P Y. Optimization design method of shaftless propeller based on response surface model[D]. Dalian: Dalian University of Technology, 2020 (in Chinese).
[18] 兰加芬, 欧阳武, 严新平. 无轴轮缘推进器水动力性能分析及桨叶强度校核[J]. 船舶工程, 2018, 40(10): 52–58. LAN J F, OUYANG W, YAN X P. Hydrodynamic performance analysis and blade strength verification of shaftless rim-driven thruster[J]. Ship Engineering, 2018, 40(10): 52–58 (in Chinese).
[19] GAGGERO S. A study on the wake evolution of a set of RIM-driven thrusters[J]. Journal of Marine Science and Engineering, 2023, 11(9): 1659. doi: 10.3390/jmse11091659
[20] WU Z W, GONG J, DING J M, et al. Autonomous modification and optimization method for rim-driven system in surface ships[J]. Ocean Engineering, 2023, 290: 116293. doi: 10.1016/j.oceaneng.2023.116293
[21] LEA M, THOMPSON D, BLARCOM B, et al. Scale model testing of a commercial rim-driven propulsor pod[J]. Journal of Ship Production, 2003, 19(2): 121–130. doi: 10.5957/jsp.2003.19.2.121
[22] MENTER F R. Two-equation eddy-viscosity turbulence models for engineering applications[J]. AIAA Journal, 1994, 32(8): 1598–1605. doi: 10.2514/3.12149
[23] SHUR M L, SPALART P R, STRELETS M KH, et al. A hybrid RANS-LES approach with delayed-DES and wall-modelled LES capabilities[J]. Int. J. Heat Fluid Flow., 2008, 29(6): 1638–1649. doi: 10.1016/j.ijheatfluidflow.2008.07.001
[24] SMAGORINSKY J. General circulation experiments with the primitive equations: part I, the basic experiment[J]. Monthly Weather Review. 91, 99-164.
[25] SIEMENS. Theory guide for STAR-CCM+17.06[S], 2022. https://docs.sw.siemens.com/documentation/external/PL20221128664127487/zh-CN/userManual/starccmp_userguide_html/STARCCMP/index.html
[26] ITTC. Practical guidelines for ship CFD applications[S]. [S. 1. ]: ITTC, 2014.
[27] FARASSAT F. Derivation of formulations 1 and 1A of Frassat: NASA/TM-2007-214853[R]. Hampton: Langley Research Center, 2007: 1-25.
[28] DI FRANCESCANTONIO P. A new boundary integral formulation for the prediction of sound radiation[J]. Journal of Sound and Vibration, 1997, 202(4): 491–509. doi: 10.1006/jsvi.1996.0843
[29] SEZEN S, COSGUN T, YURTSEVEN A, et al. Numerical investigation of marine propeller underwater radiated noise using acoustic analogy part 2: the influence of eddy viscosity turbulence models[J]. Ocean Engineering, 2021, 220: 108353. doi: 10.1016/j.oceaneng.2020.108353
[30] IANNIELLO S, MUSCARI R, DI MASCIO A. Ship underwater noise assessment by the acoustic analogy. part I: nonlinear analysis of a marine propeller in a uniform flow[J]. Journal of Marine Science and Technology, 2013, 18(4): 547–570. doi: 10.1007/s00773-013-0227-0
[31] IANNIELLO S, DE BERNARDIS E. Farassat's formulations in marine propeller hydroacoustics[J]. International Journal of Aeroacoustics, 2015, 14(1-2): 87–103. doi: 10.1260/1475-472X.14.1-2.87
[32] ITTC. Recommended procedures and guidelines for uncertainty analysis in CFD verification and validation, methodology and procedures[S]. [S. 1]: ITTC, 2021.
[33] ASME. Standard for verification and validation in computational fluid dynamics and heat transfer: ASME V&V 20[S]. New York: American Society of Mechanical Engineers, 2009.
[34] ITTC. Recommended procedures and guidelines for model-scale propeller cavitation noise measurements[S]. [S. 1]: ITTC, 2021.
[35] 杨琼方, 王永生, 吴杰长. 泵类推进器振动和噪声控制机理[M]. 上海: 上海交通大学出版社, 2021. YANG Q F, WANG Y S, WU J C. Vibration and radiation noise control for surface warship and submarine pumpjets[M]. Shanghai: Shanghai Jiao Tong University Press, 2021 (in Chinese).

计量
- 文章访问数: 122
- HTML全文浏览量: 21
- PDF下载量: 45
